еөҢе…ҘејҸж №ж–Ү件系з»ҹзҡ„жһ„е»ә
JustDo
жҲ‘е°Ҷд»ҺдёҖдёӘеҲқеӯҰиҖ…зҡ„и§Ҷи§’пјҢе…Ёйқўзҡ„д»Ӣз»Қж №ж–Ү件系з»ҹзҡ„жһ„е»әпјҢеҠӣжұӮжңҖйҖҡдҝ—пјҢжңҖжҳ“жҮӮпјҢжңҖз®ҖжҙҒгҖӮ
йҰ–е…ҲжҲ‘们жқҘдәҶи§ЈдёҖдёӢд»Җд№ҲеҸ«еҒҡж №ж–Ү件系з»ҹ
дёҖпјҢд»Җд№ҲеҸ«ж №ж–Ү件系з»ҹ
з”ЁдёҖеҸҘиҜқжқҘи®Іе°ұжҳҜ"ж“ҚдҪңзі»з»ҹжҸҗдҫӣз»ҷз”ЁжҲ·зҡ„дёҖдёӘжҺҘеҸЈ"пјҢжҜ”еҰӮиҜҙwindowsпјҢдҪ иҰҒжҳҜжІЎжңүCзӣҳпјҢDзӣҳд№Ӣзұ»зҡ„жһ„жһ¶пјҢдҪ зЁӢеәҸжҖҺд№Ҳеӯҳе…ҘзЎ¬зӣҳпјҹдҪ еҰӮдҪ•ж“ҚдҪңзЎ¬зӣҳж•°жҚ®пјҹиҝӣзЁӢеҰӮдҪ•д»ҺзЎ¬зӣҳиҜ»еҸ–ж•°жҚ®пјҹ
Linuxж“ҚдҪңзі»з»ҹжӣҙиғҪдҪ“йӘҢжҺҘеҸЈиҝҷдёӘжҰӮеҝөпјҢеӣ дёәд»–жҠҠжүҖжңүзҡ„и®ҫеӨҮйғҪиҷҡжӢҹжҲҗдёҖдёӘж–Ү件пјҢеҜ№и®ҫеӨҮзҡ„ж“ҚдҪңе°ұжҳҜеҜ№ж–Ү件зҡ„ж“ҚдҪңгҖӮеңЁLinuxдёӯеҰӮжһңжІЎжңүж–Ү件系з»ҹзҡ„иҜқпјҢз”ЁжҲ·е°ұе’Ңж“ҚдҪңзі»з»ҹзҡ„дәӨдә’е°ұж–ӯејҖдәҶпјҢжҲ‘д»¬ж— жі•йҖҡиҝҮshellиҰҒжұӮж“ҚдҪңзі»з»ҹжү§иЎҢеҗ„з§Қе‘Ҫд»ӨпјҢд№ҹж— жі•иҝҗиЎҢеҗ„з§ҚзЁӢеәҸгҖӮ
жӣҙз»ҶиҮҙзҡ„жқҘиҜҙж №ж–Ү件系з»ҹпјҢе®ғе…¶е®һеҢ…жӢ¬з®ЎзҗҶзӣ®еҪ•е’Ңж•°жҚ®зҡ„ж–№жі•е’Ңж–Ү件вҖўзӣ®еҪ•зҡ„з»„з»Үж–№жі•пјҢеҸҠжүҖжңүж–Ү件е’Ңзӣ®еҪ•жһ„жҲҗдёҖдёӘж №ж–Ү件系з»ҹ
ж №ж–Ү件系з»ҹжңүеҫҲеӨҡз§Қз§Қзұ»пјҢжңҖеёёз”Ёзҡ„жңү
MS-DOSзҡ„FAT32
LinuxеҸ‘иЎҢзүҲз»Ҹеёёз”Ёзҡ„ext3 etx4
еөҢе…ҘејҸз»Ҹеёёз”Ёзҡ„ramfs yaffs
дёҚеҗҢзҡ„з§Қзұ»зҡ„ж №ж–Ү件系з»ҹжңүдёҚеҗҢз»„з»Үж–Ү件зҡ„ж–№жі•е’Ңж•°жҚ®зҡ„з»„з»Үж–№жі•гҖӮеҰӮжғідәҶи§Јзҡ„жӣҙж·ұе…ҘзӮ№пјҢеҺ»жҹҘзҷҫеәҰзҷҫ科гҖӮ
дәҢlinuxж №ж–Ү件зӣ®еҪ•з»“жһ„
жүҖжңүLinuxзҡ„йҒөеҫӘдёҖдёӘж–Ү件系з»ҹж ҮеҮҶеҸ«"FHS"пјҲfilesystem hierarchy standradпјү, http://www.pathname/иҜҘзҪ‘з«ҷеҸҜд»ҘзңӢ
йҖҡеёёдёҖдёӘLinuxж–Ү件系з»ҹеә”иҜҘеҰӮдёӢ
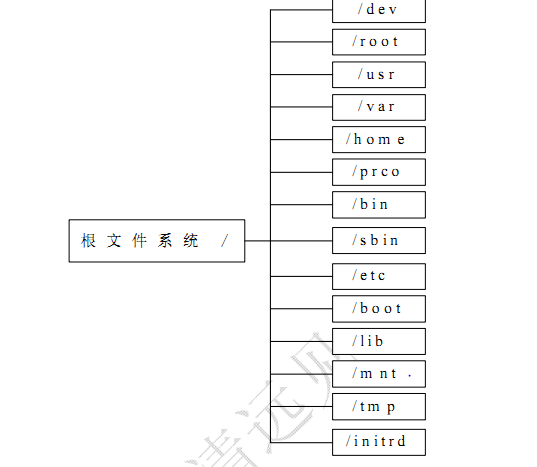
/dev deviceзҡ„з®ҖеҶҷпјҢж„ҸжҖқжҳҜиҝҷдёӘзӣ®еҪ•еӯҳж”ҫзҡ„е…ЁйғЁжҳҜи®ҫеӨҮж–Ү件пјҢlinuxе°ҶжүҖжңүи®ҫеӨҮйғҪжҠҪиұЎжҲҗж–Ү件ж”ҫеңЁиҝҷдёӘзӣ®еҪ•пјҢйҖҡиҝҮеҜ№ж–Ү件зҡ„ж“ҚдҪңе°ұеҸҜд»ҘжҺ§еҲ¶и®ҫеӨҮпјҢжҜ”еҰӮиҜҙзЎ¬зӣҳпјҢдёҖиҲ¬жҳҜsdaжү“еӨҙзҡ„пјҢеҸҜд»ҘйҖҡиҝҮ mount /dev/sda /mntжқҘжҢӮиҪҪзЎ¬зӣҳ
/root иҝҷдёӘжҳҜзі»з»ҹз®ЎзҗҶе‘ҳдё“з”Ёзҡ„зӣ®еҪ•пјҢиҝҷйҮҢеӯҳж”ҫдәҶдёҖдәӣеј•еҜјзі»з»ҹзҡ„еӨҮд»Ҫж–Ү件пјҢж–Ү件系з»ҹжҢӮиҪҪдҝЎжҒҜпјҢзі»з»ҹдҝ®еӨҚе·Ҙе…·еӨҮд»Ҫе·Ҙе…·зӯү
/usr иҝҷдёӘзӣ®еҪ•еӯҳж”ҫзҡ„жҳҜе…ұдә«гҖҒеҸӘиҜ»зҡ„зЁӢеәҸе’Ңж•°жҚ®гҖӮ
/var variableзҡ„з®ҖеҶҷпјҢеӯҳж”ҫзҡ„жҳҜдёҖдәӣеҸҜеҸҳзҡ„ж•°жҚ®пјҢж—Ҙеҝ—ж–Ү件пјҢдёҙж—¶ж–Ү件д»Җд№Ҳзҡ„
/home 家зӣ®еҪ•пјҢеӨ§е®¶з”ЁиҝҮLinuxеә”иҜҘйғҪзҹҘйҒ“иҝҷдёӘзӣ®еҪ•жҳҜе№Іеҳӣзҡ„пјҢиҝҷдёӘзӣ®еҪ•зӣёеҪ“дәҺwindowsзҡ„жҲ‘зҡ„ж–ҮжЎЈпјҢдёҖиҲ¬е·ҘдҪңйғҪеңЁиҝҷдёӘзӣ®еҪ•йҮҢиҝӣиЎҢгҖӮ
/procиҝҷжҳҜдёҖдёӘз©әзӣ®еҪ•пјҢдёҚиҝҮзі»з»ҹи·‘иө·жқҘд№ӢеҗҺе°ұдёҚжҳҜз©әзҡ„дәҶпјҢйҮҢйқўзҡ„зӣ®еҪ•ж–Ү件йғҪжҳҜз”ұзі»з»ҹз”ҹжҲҗзҡ„пјҢдҪҶ他并дёҚеңЁзү©зҗҶеӯҳеӮЁи®ҫеӨҮдёҠжңүж•°жҚ®пјҢжҳҜзі»з»ҹеңЁеҶ…еӯҳдёҠжһ„е»әзҡ„пјҢжүҖжңүжҳҜдёӘиҷҡжӢҹзҡ„家дјҷгҖӮйҮҢйқўеҢ…еҗ«дәҶдёҖдәӣзі»з»ҹдҝЎжҒҜпјҢcpuдҝЎжҒҜд»Җд№Ҳзҡ„
/bin еӯҳж”ҫзҡ„жҷ®йҖҡе‘Ҫд»Өзҡ„еҸҜжү§иЎҢж–Ү件
/sbin еӯҳж”ҫзҡ„жҳҜзі»з»ҹе‘Ҫд»Өзҡ„еҸҜжү§иЎҢж–Ү件
/etc еӯҳж”ҫдәҶеҫҲеӨҡй…ҚзҪ®ж–Ү件пјҢжҜ”еҰӮзі»з»ҹеҲқе§ӢеҢ–и„ҡжң¬пјҢжҢӮиҪҪж–Ү件зҡ„й…ҚзҪ®ж–Ү件зӯүзӯү
/boot еӯҳж”ҫзҡ„жҳҜзі»з»ҹзҡ„bootloaderе’ҢеҶ…ж ёеҸҠе…¶й…ҚзҪ®ж–Ү件пјҢдёҖиҲ¬еөҢе…ҘејҸзі»з»ҹдёҚйңҖиҰҒиҝҷдёӘзӣ®еҪ•пјҢеӣ дёәеөҢе…ҘејҸbootloderйғҪжҳҜеҚ•зӢ¬ж”ҫзҡ„дёҖдёӘеҲҶеҢә
/lib зі»з»ҹзҡ„еә“ж–Ү件
/initrd иҝҷдёӘзӣ®еҪ•жҳҜз©әзҡ„пјҢз”ЁжқҘеҗҜеҠЁж—¶жҢӮиҪҪinitrd.imgй•ңеғҸзҡ„,initrd.imgй•ңеғҸд№ҹжҳҜдёҖз§Қж №ж–Ү件系з»ҹпјҢдёҖиҲ¬еҸ‘иЎҢзүҲеҫ—linuxдҪҝз”ЁдёӨйҳ¶ж®өжҢӮиҪҪж №ж–Ү件系з»ҹпјҢ第дёҖж¬Ўйҳ¶ж®өдҪҝз”Ёinitrd.imgж №ж–Ү件系з»ҹпјҢж №ж–Ү件зӣҙжҺҘеңЁеҶ…еӯҳйҮҢиҝҗиЎҢпјҢйҖҹеәҰеҝ«пјҢ然еҗҺжҢӮиҪҪзЎ¬зӣҳдёҠзҡ„ж №ж–Ү件系з»ҹпјҢиҝҷж ·еҸҜд»ҘеҠ еҝ«йҖҹеәҰпјҢеөҢе…ҘејҸдёҖиҲ¬дёҚйңҖиҰҒиҝҷдёӘзӣ®еҪ•гҖӮ
/tmp дёҙж—¶ж–Ү件зӣ®еҪ•
/mnt дёҙж—¶жҢӮиҪҪзӮ№
дёүпјҢyaffs2ж–Ү件系з»ҹзҡ„жһ„е»ә
Yaffs2иғҪеҫҲеҘҪзҡ„ж”ҜжҢҒflashпјҢеңЁеөҢе…ҘејҸйўҶеҹҹеә”з”Ёе№ҝжіӣпјҢжүҖд»ҘжҲ‘们йҖүжӢ©yaffs2
1 йҰ–е…ҲжҲ‘们иҰҒж №жҚ®йңҖиҰҒеҲӣе»әдёҖдёӘж №ж–Ү件系з»ҹжЎҶжһ¶
еҸӮиҖғдёҠйқўзҡ„зӣ®еҪ•з»“жһ„пјҢжҲ‘们дёҚйңҖиҰҒзҡ„жҳҜboot,initrdиҝҷдёӨдёӘзӣ®еҪ•,并еўһеҠ дёҖдёӘsysзӣ®еҪ•пјҢиҝҷдёӘsysзӣ®еҪ•жҳҜbusyBoxзҡ„дёҖдёӘж”ҜжҢҒзғӯжӢ”жҸ’зҡ„зЁӢеәҸmdevйңҖиҰҒзҡ„зӣ®еҪ•
йҰ–е…Ҳе»әдёҖдёӘжҖ»зӣ®еҪ•жҲ‘е‘ҪеҗҚдёәroot_fs,然еҗҺе»әз«ӢеҘҪеӯҗзӣ®еҪ•
mkdir root_fs
cd root_fs
mkdir bin dev etc home lib mnt proc root sbin sys tmp
2 е®үиЈ…еҘҪbusybox
иҝӣе…Ҙbusyboxзӣ®еҪ•
Make menuconfig
иҝӣе…Ҙbusybox setting->
Build options->
йҖүдёӯ build busybox as a static binaryе’Ңbulid with lager file supportйҖүйЎ№
иЎЁзӨәдҪҝз”ЁйқҷжҖҒеә“зј–иҜ‘пјҢж”ҜжҢҒеӨ§ж–Ү件
еҶҚиҝӣе…Ҙ busybox library tuning
йҖүдёӯvi-style line editing commandsе’Ңfancy shell promptsи®ҫзҪ®е‘Ҫд»ӨиЎҢйЈҺж ј
然еҗҺзј–иҜ‘пјҢ
Make
е®үиЈ… make install
然еҗҺжӢ·иҙқе®үиЈ…зӣ®еҪ• _installдёӢзҡ„жүҖжңүж–Ү件 еҲ°жҲ‘们е…ҲеүҚе»әзҡ„root_fsзӣ®еҪ•дёӢ
cp _install/* ../root_fs -rf
3 еңЁdevзӣ®еҪ•дёӢеҲӣе»әдёӨдёӘи®ҫеӨҮиҠӮзӮ№
mknod console c 5 1
mknod null c 1 3
иҝҷдёӨдёӘжҳҜзі»з»ҹиҝҗиЎҢ第дёҖдёӘеҲқе§ӢеҢ–иҝӣзЁӢеҝ…йңҖиҰҒдҪҝз”Ёзҡ„дҪҝз”Ёзҡ„дҝ©дёӘи®ҫеӨҮ
CиЎЁзӨәеӯ—з¬Ұи®ҫеӨҮ еҶҚеҗҺйқўжҳҜдё»и®ҫеӨҮеҸ·е’Ңж¬Ўи®ҫеӨҮеҸ· з”ЁжқҘжҢҮзӨәж“ҚдҪңзі»з»ҹжүҫеҲ°й©ұеҠЁзҡ„
жӢ·иҙқbusyboxзҡ„е®һдҫӢй…ҚзҪ®ж–Ү件еҲ°etcдёӢйқў
Cp ../busybox-1.15/examples/bootfloopy/etc/* ./
иҝҷйҮҢйқўжңүеӣӣдёӘж–Ү件
Fstab init.d inittab profile
Busyboxжһ„е»әзҡ„ж №ж–Ү件系з»ҹеҗҜеҠЁжөҒзЁӢжҳҜиҝҷж ·зҡ„пјҢе…Ҳж №жҚ®е‘Ҫд»ӨиЎҢеҸӮж•°init=linuxrc
еҗҜеҠЁlinuxrcзЁӢеәҸ
Linurcж №жҚ®inittabй…ҚзҪ®ж–Ү件жқҘеҗҜеҠЁзӣёеә”зҡ„и„ҡжң¬жҲ–иҝӣзЁӢ
Inittabж јејҸпјҡ<id>::<runlevels>пјҡ<action>:<process>
зҺ°еңЁжҲ‘们дҝ®ж”№inittabеҰӮдёӢ
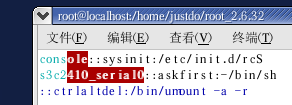
иҝҷиЎЁзӨә
иҝҗиЎҢзҡ„rcSи„ҡжң¬пјҢиҝҗиЎҢзә§еҲ«дёәsysinit,иҜҘи„ҡжң¬иҰҒдҪҝз”ЁдҪҝз”ЁжҺ§еҲ¶еҸ°
иҝҗиЎҢshellи§ЈйҮҠеҷЁпјҢиҝҗиЎҢзә§еҲ«дёәaskfirst,иҜҘиҝӣзЁӢиҰҒдҪҝз”ЁдёІеҸЈдёҖ
иҝҷдёӘеҗҚеӯ—жҳҜз”ұbusybodyдә§з”ҹзҡ„пјҢs3c2410 s3c2440йғҪжҳҜиҝҷдёӘеҗҚ
иҝҗиЎҢumount -a -rеҪ“жҢүдёӢctr alt delз»„еҗҲй”®зҡ„ж—¶еҖҷ
иҝҷйҮҢеҸҜд»ҘзңӢеҲ°linuxrcйҖҡиҝҮinittabеҗҜеҠЁдәҶrcSи„ҡжң¬
зҺ°еңЁжҲ‘们дҝ®ж”№init.dзӣ®еҪ•дёӢзҡ„rcSж–Ү件дёә
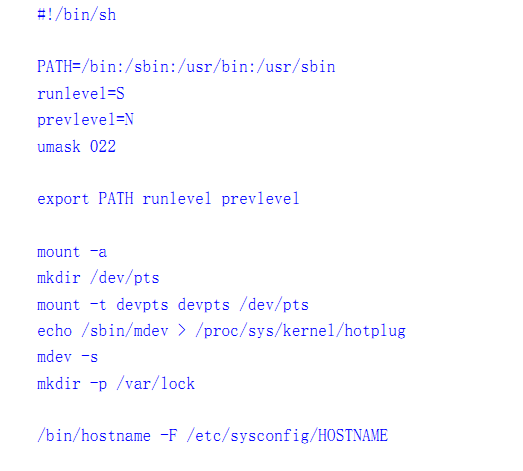
иҝҷж–Ү件жҳҜе…Ҳи®ҫзҪ®PATHеҸҳйҮҸ
еҶҚи®ҫзҪ®runlevel е’Ң prelevelеҸҳйҮҸ
Mount -aдјҡж №жҚ®fstabжҢӮиҪҪзӣ®еҪ•пјҢдҝ®ж”№fstabеҰӮдёӢ
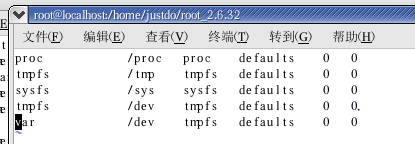
жҢӮиҪҪжүҖйңҖзҡ„ж–Ү件系з»ҹ
然еҗҺи®ҫзҪ®ж–Ү件й»ҳи®ӨеұһжҖ§
然еҗҺжҢӮиҪҪdevptsж–Ү件系з»ҹ иҝҷдёӘжҳҜз”ЁжқҘж”ҜжҢҒеӨ–йғЁзҪ‘з»ңй“ҫжҺҘиҷҡжӢҹдёӯз«Ҝеҫ—
йҮҚе®ҡеҗ‘mdevиҫ“еҮәеҲ°еҶ…ж ёзҡ„hotplugж–Ү件жқҘж”ҜжҢҒзғӯжӢ”жҸ’
иҝҗиЎҢmdev -sеңЁ/devзӣ®еҪ•дёӢз”ҹжҲҗеҶ…ж ёж”ҜжҢҒзҡ„жүҖжңүи®ҫеӨҮж–Ү件
д»ҺHOSTNAMEж–Ү件иҜ»еҸ–дё»жңәеҗҚ
жүҖд»Ҙ
еңЁ/dev/дёӢеҲӣе»әsysconfigзӣ®еҪ•еҶҚеңЁжӯӨзӣ®еҪ•дёӢеҲӣе»әHOSTNAMEж–Ү件
дҝ®ж”№HOSTNAMEж–Ү件дёәJustDo
жңҖеҘҪ
дҝ®ж”№profile
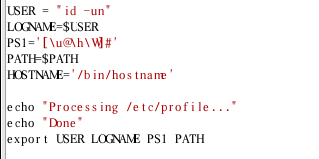
иҝҷжҳҜдҪ зҷ»йҷҶе‘Ҫд»Өи§ЈйҮҠеҷЁзҡ„й…ҚзҪ®ж–Ү件пјҢд»–иғҪеӨҹж”№еҸҳдҪ е‘Ҫд»ӨиЎҢеүҚйқўжҳҫзӨәзҡ„еҶ…е®№
/WжҳҜеҪ“еүҚзӣ®еҪ•еҗҚ
жңҖеҗҺдёҖжӯҘпјҡе°ҶжүҖйңҖзҡ„еә“ж–Ү件全йғЁжӢ·иҙқеҲ°libзӣ®еҪ•дёӢпјҢиҝҷдёӘеә“ж–Ү件еңЁдҪ жүҖдҪҝз”Ёзҡ„дәӨеҸүе·Ҙе…·й“ҫдёӯ
cp /usr/local/arm/4.3.2/arm-none-linux-gnueabi/libc/armv4t/lib/* ./lib
еҘҪдәҶ е®ҢжҲҗдёҠйқўжүҖжңүзҡ„жӯҘйӘӨд№ӢеҗҺ
дҪҝз”Ёmkyaffs2imageе·Ҙе…·зј–иҜ‘еҘҪд№ӢеҗҺдёӢиҪҪеҲ°ејҖеҸ‘жқҝзҡ„ж №ж–Ү件еҲҶеҢәе°ұеҸҜд»Ҙи·‘дәҶ
еҰӮжһңеҮәзҺ°
"Failed to execute /linuxrc. Attempting defaults...
Kernel panic - not syncing: No init found. Try passing init= option to kernel. "
жңүеҸҜиғҪжҳҜдҪ дҪҝз”Ёзҡ„mkyaffs2imageе·Ҙе…·дёҚж”ҜжҢҒ128Mзҡ„flash
жҲ‘зҡ„еҸҰеӨ–дёҖзҜҮеҚҡе®ўе·Із»ҸжҸҗеҲ°жҖҺд№Ҳи§ЈеҶідәҶ
з»јдёҠ зі»з»ҹеҗҜеҠЁзҡ„жөҒзЁӢеӨ§жҰӮжҳҜиҝҷдёӘж ·еӯҗзҡ„еҲ°еӨ„еҝ…иҰҒзҡ„зҺҜеўғеҸҳйҮҸпјҢMountдёҠжүҖйңҖзҡ„еҲҶеҢәпјҢжңҖеҗҺиҝҗиЎҢи„ҡжң¬и§ЈйҮҠеҷЁ
PS:еҰӮжңүй”ҷиҜҜпјҢиҝҳиҜ·жҢҮжӯЈпјҡJustDo,QQ:843308498
еҲҶдә«еҲ°пјҡ





зӣёе…іжҺЁиҚҗ
жһ„е»әеөҢе…ҘејҸLinuxзҡ„ж №ж–Ү件系з»ҹжһ„е»әеөҢе…ҘејҸLinuxзҡ„ж №ж–Ү件系з»ҹ
еҹәдәҺS3C2440зҡ„еөҢе…ҘејҸLinuxж №ж–Ү件系з»ҹжһ„е»ә.pdf
LinuxеҶ…ж ёеҲ¶дҪңдёҺеөҢе…ҘејҸж №ж–Ү件系з»ҹзҡ„жһ„е»ә
жһ„е»әеҹәжң¬еөҢе…ҘејҸLinuxж №ж–Ү件系з»ҹиҜҰз»ҶжӯҘйӘӨ,并жү“еҢ…дәҶдёҖдёӘе·Із»ҸеҲ¶дҪңеҘҪзҡ„ж–Ү件系з»ҹпјҢеҸҜзӣҙжҺҘдҪҝз”ЁгҖӮйқһеёёеҘҪзҡ„ж–ҮжЎЈгҖӮ
еөҢе…ҘејҸLinuxж №ж–Ү件系з»ҹзҡ„жһ„е»ә.pdf
еөҢе…ҘејҸLinuxж №ж–Ү件系з»ҹжһ„е»әжӯҘйӘӨеҢ…жӢ¬busyboxе®үиЈ…зӯүзӯүгҖӮгҖӮ
еҹәдәҺPOKYзҡ„еөҢе…ҘејҸLinuxж №ж–Ү件系з»ҹзҡ„жһ„е»ә.pdf
еңЁеөҢе…ҘејҸLinuxзі»з»ҹдёӯпјҢж №ж–Ү件系з»ҹжҳҜжһ„е»әеөҢе…ҘејҸLinuxзі»з»ҹзҡ„йҮҚиҰҒз»„жҲҗйғЁеҲҶпјҢжҳҜLinuxпјҸUnixзі»з»ҹдёҚеҸҜжҲ–зјәзҡ„组件гҖӮиҝҷйҮҢд»ҺLinuxж №ж–Ү件系з»ҹеә•еұӮеҮәеҸ‘пјҢиҜҰз»ҶеҲҶжһҗж №ж–Ү件系з»ҹзҡ„з»„жҲҗе’ҢеҰӮдҪ•еҲ©з”ЁBusyboxй…ҚзҪ®е®Ңж•ҙзҡ„ж №ж–Ү件系з»ҹпјҢ并з»ҷ...
жһ„е»әеөҢе…ҘејҸLinuxзҡ„ж №ж–Ү件系з»ҹ.pdf
еҸҰдёҖдёӘе°ұжҳҜж №ж–Ү件系з»ҹеҶ…е®№зҡ„йҖүжӢ©пјҢе®ғе…ізі»еҲ°ж №ж–Ү件系з»ҹжүҖиғҪжҸҗдҫӣзҡ„еҠҹиғҪеҸҠе°әеҜёеӨ§е°ҸгҖӮеөҢе…ҘејҸи®ҫеӨҮдёӯдҪҝз”Ёзҡ„еӯҳеӮЁеҷЁжҳҜеғҸFlashй—ӘеӯҳиҠҜзүҮгҖҒе°ҸеһӢй—ӘеӯҳеҚЎзӯүдё“дёәеөҢе…ҘејҸзі»з»ҹи®ҫи®Ўзҡ„еӯҳеӮЁиЈ…зҪ®гҖӮFlashжҳҜзӣ®еүҚеөҢе…ҘејҸзі»з»ҹдёӯе№ҝжіӣйҮҮз”Ёзҡ„дё»жөҒ...
еөҢе…ҘејҸLinuxж №ж–Ү件系з»ҹзҡ„жһ„е»әдёҺеҲҶжһҗ.pdf
жһ„е»әеҹәжң¬зҡ„еөҢе…ҘејҸLinuxж №ж–Ү件系з»ҹ
еөҢе…ҘејҸLinuxж №ж–Ү件系з»ҹNFSеҗҜеҠЁж–№ејҸжһ„е»ә.pdf
еөҢе…ҘејҸLinuxзі»з»ҹдёӢж №ж–Ү件系з»ҹзҡ„жһ„е»ә.pdf
жһ„е»әеөҢе…ҘејҸLinuxзҡ„ж №ж–Ү件系з»ҹзҡ„busyboxж–№жі•.pdf
еөҢе…ҘејҸLinuxдёӯйғҪйңҖиҰҒжһ„е»әж №ж–Ү件系з»ҹпјҢжң¬ж–ҮжЎЈе°ҶиҜҰз»Ҷд»Ӣз»Қж №ж–Ү件系з»ҹзҡ„жһ„е»әпјҢеёҢжңӣеҜ№еӨ§е®¶жңүеё®еҠ©пјҒ
в—Һ Linux ж–Ү件系з»ҹжҰӮиҝ° в—Һ еёёи§Ғзҡ„еөҢе…ҘејҸж–Ү件系з»ҹ в—Һ еөҢе…ҘејҸж №ж–Ү件系з»ҹзҡ„дёҖиҲ¬з»“жһ„ в—Һ еөҢе…ҘејҸж №ж–Ү件系з»ҹжһ„е»әзҡ„дёҖиҲ¬ж–№жі•